Home | toopazo
WordPress es un gestor de paginas web escrito en PHP e integrado a bases de datos locales para almacenar el contenido en si. Su código fuente es open-source y su uso es gratuito [1]. Contiene cientos de miles de ejemplos y extensiones de todo tipo para ser usado en miles de casos diferentes. Existe un ecosistema completo girando al rededor de su uso, desde los servidores que lo alojan (Hostinger, Bluehost, Ionos y miles de miles más) hasta creadores de plugins que lo complementan. Y para rematar la cosa, se estima que cerca del 40% de todos los sitios web disponibles en internet operan usando WordPress [2]. Por todo lo anterior vale la pena invertir la pregunta y cuestionarse: ¿porque no usar WordPress?.

El presente escrito es un reporte acerca de mi experiencia programando un ESC para obtener datos en linea. Un ESC es un controlador para motores sin escobilla que aumenta o disminuye la potencia inyectada a éste para así regular su velocidad de giro. Obtener datos instantáneos como voltaje, corriente y velocidad del motor son de vital importancia para estimar el consumo de cada rotor y pueden ser usados incluso como parte del controlador de vuelo. El software descrito en este reporte se encuentra disponible en el repositorio https://github.com/toopazo/live_esc
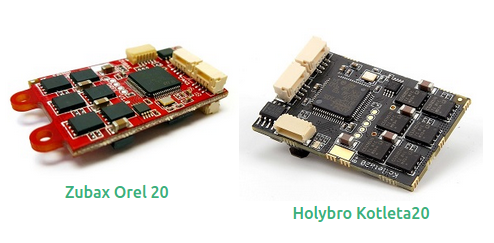

 Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
El presente escrito es un reporte acerca de los diferentes protocolos de control usados entre un ESC y un computador de vuelo. Todo esto en el contexto de vehículos autónomos no tripulados. Todos estos protocolos cumplen la misma función, indican cuan rapido o lento deben girar los motores. Pero una serie de caracteristicas tecnicas hacen que unos protocolos sean mejores que otros para ciertos vehículos.
Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
El presente escrito es la versión practica de Alternativas Dronecode, un articulo anterior acerca de las alternativas open-source disponibles para volar un vehículo aéreo no tripulado. En particular explicaremos los componentes principales de todo multirotor, y nuestra experiencia al armar un kit S500 v2 de la empresa Holybro. Más que el armado en si mismo trataremos de describir la estructura general de todo vehículo así como los pasos que seguimos para verificar su correcto armado y vuelo.


 Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021
Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021



Las compañías de Drones dominantes como DJI, Parrot, SenseFly, Freefly, etc, ofrecen al mercado soluciones cerradas de hardware y software. Sus vehículos son de muy buena calidad y su fama es merecida. Pero si nuestra intención es aprender, experimentar, modificar o innovar con esta tecnología, entonces existen alternativas mejores que nos permiten hacer todo esto y más.