El presente escrito es la versión practica de Alternativas Dronecode, un articulo anterior acerca de las alternativas open-source disponibles para volar un vehículo aéreo no tripulado. En particular explicaremos los componentes principales de todo multirotor, y nuestra experiencia al armar un kit S500 v2 de la empresa Holybro. Más que el armado en si mismo trataremos de describir la estructura general de todo vehículo así como los pasos que seguimos para verificar su correcto armado y vuelo.


 Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021
Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021
1) Modelos disponibles para armar
Para los amantes del concepto open-source existen en la actualidad una serie de kits de vehículos multirotor que pueden ser adquiridos y armados por alguien con relativamente poca experiencia. La idea de este escrito es reducir esa barrera aún más. Es más, una simple búsqueda en la web por “frame kit multirotor drone” nos arroja una serie de alternativas para distintos propósitos: fotografía, carrera de Drones, filmación, carga, etc.
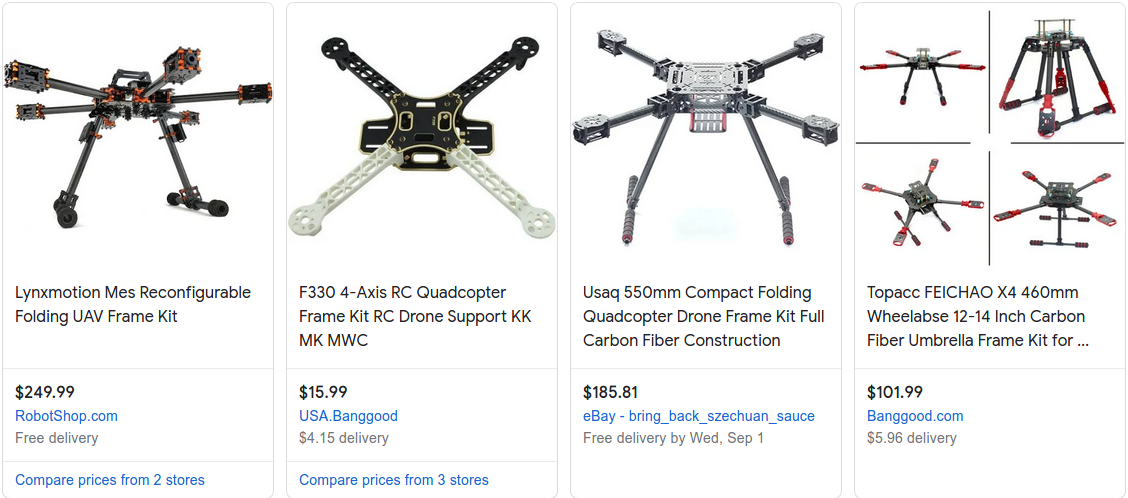 Ejemplo de kits disponibles para armado de Drones, precio en USD
Ejemplo de kits disponibles para armado de Drones, precio en USD
Desde el punto de vista constructivo, es posible separar un multirotor en 3 componentes: un esqueleto, actuadores y un computador de vuelo. A continuación revisamos de brevisima manera en que consite cada uno de ellos.
El tamaño, peso, geometría y numero de brazos del esqueleto viene definido por el tipo de misión que queremos lograr con el vehículo. ¿Necesitamos portar un sensor de gases en una industria?, entonces lo más probable es que necesitemos una estructura de tamaño medio, robusta y de peso medio alto. ¿Queremos transmitir vídeo en vivo?, es probable entonces que una estructura pequeña y liviana nos baste. ¿Necesitamos cargar cajas de un lado a otro?, es probable que necesitemos más hélices de lo usual y una estructura más pesada.
Los actuadores son la suma de ESC + Motores + Hélices. Los controladores de motor son conocidos en inglés como Electronic Speed Controllers (ESC) y son los encargados de regular su velocidad de giro. Para multirotores casi siempre se utilizan motores de corriente continua y sin escobilla (burshless DC motors). Finalmente las hélices son las laminas diseñadas para rotar y desplazar el aire circundante de manera de generar empuje.
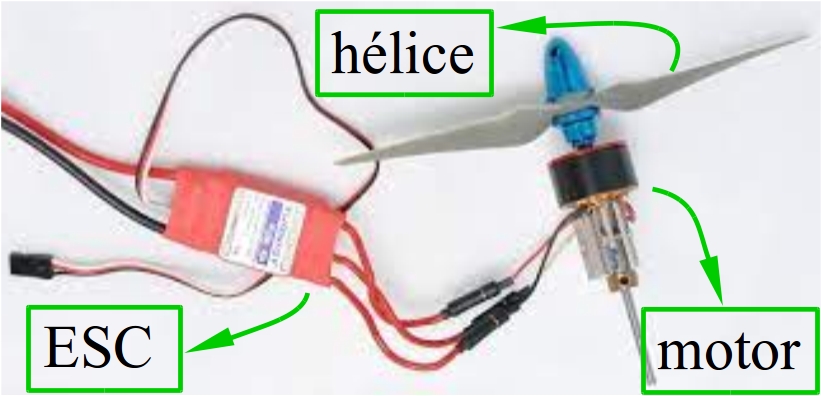 Ejemplo de ESC + motor + hélice usados comúnmente
Ejemplo de ESC + motor + hélice usados comúnmente
Finalmente tenemos el computador de vuelo, el cual es el encargado de estimar la posición y orientación del vehículo usando sensores inerciales, GPS y otros. Es además el encargado de coordinar los sistemas de radio, control remoto y demás electrónica. El computador en si mismo contiene los sensores más todo el software de vuelo.
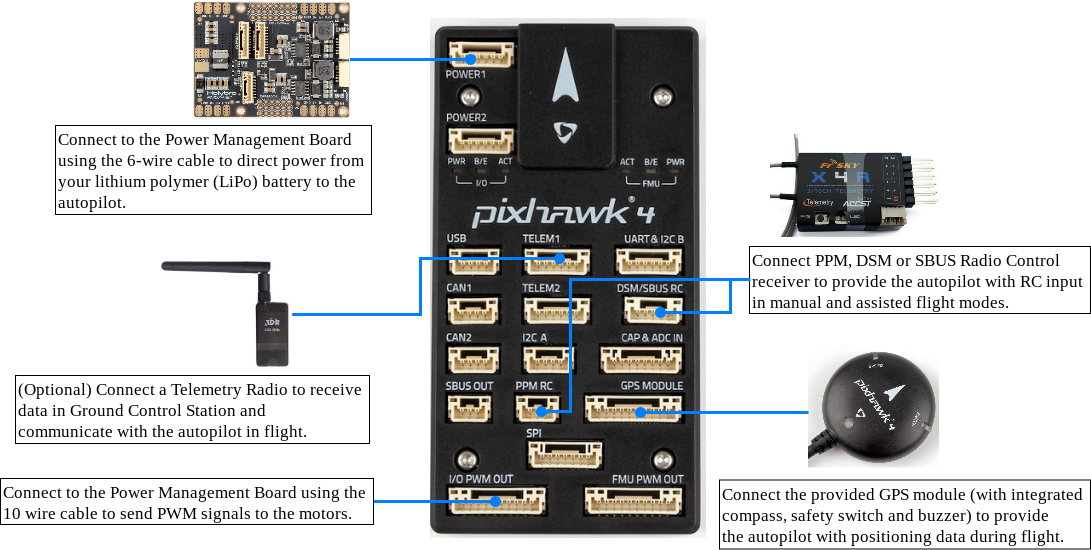 Ejemplo de computador de vuelo. Fuente: docs.px4.io
Ejemplo de computador de vuelo. Fuente: docs.px4.io
2) Armado mecánico y configuración inicial
Este paso depende en un 100% del modelo que se haya comprado. Cada fabricante cuenta (o debería contar) con un manual de instrucción en que detalle este proceso. En nuestro caso Holybro provee de este enlace al manual. Con casi el mismo contenido Px4 también provee instrucciones de armado en este otro enlace.
Existen además múltiples tutoriales y una muy buena serie de videos en Youtube acerca del armado del kit S500.
-
| [Pixhawk 4 Flight Controller ULTIMATE Tutorial |
Pixhawk 4 + S500 Drone Build Tutorial |
Part 1](https://www.youtube.com/watch?v=wsrRNqihjE4) |
-
| [S500 Quadcopter Frame Guided Assembly |
Pixhawk 4 + S500 Drone Build Tutorial |
Part 2](https://www.youtube.com/watch?v=dDOQI5NoNP0) |
-
| [Pixhawk 4 Receiver and Transmitter Configuration |
Pixhawk 4 + S500 Drone Build Tutorial |
Part 3](https://www.youtube.com/watch?v=w40P1CQQ9Ls) |
-
| [Pixhawk 4 Setup and Calibration with QGroundControl |
Pixhawk 4 + S500 Drone Build Tutorial |
Part 4](https://www.youtube.com/watch?v=BNzeVGD8IZI) |
Más abajo se puede ver una sucinta serie de fotos de nuestra experiencia en el armado


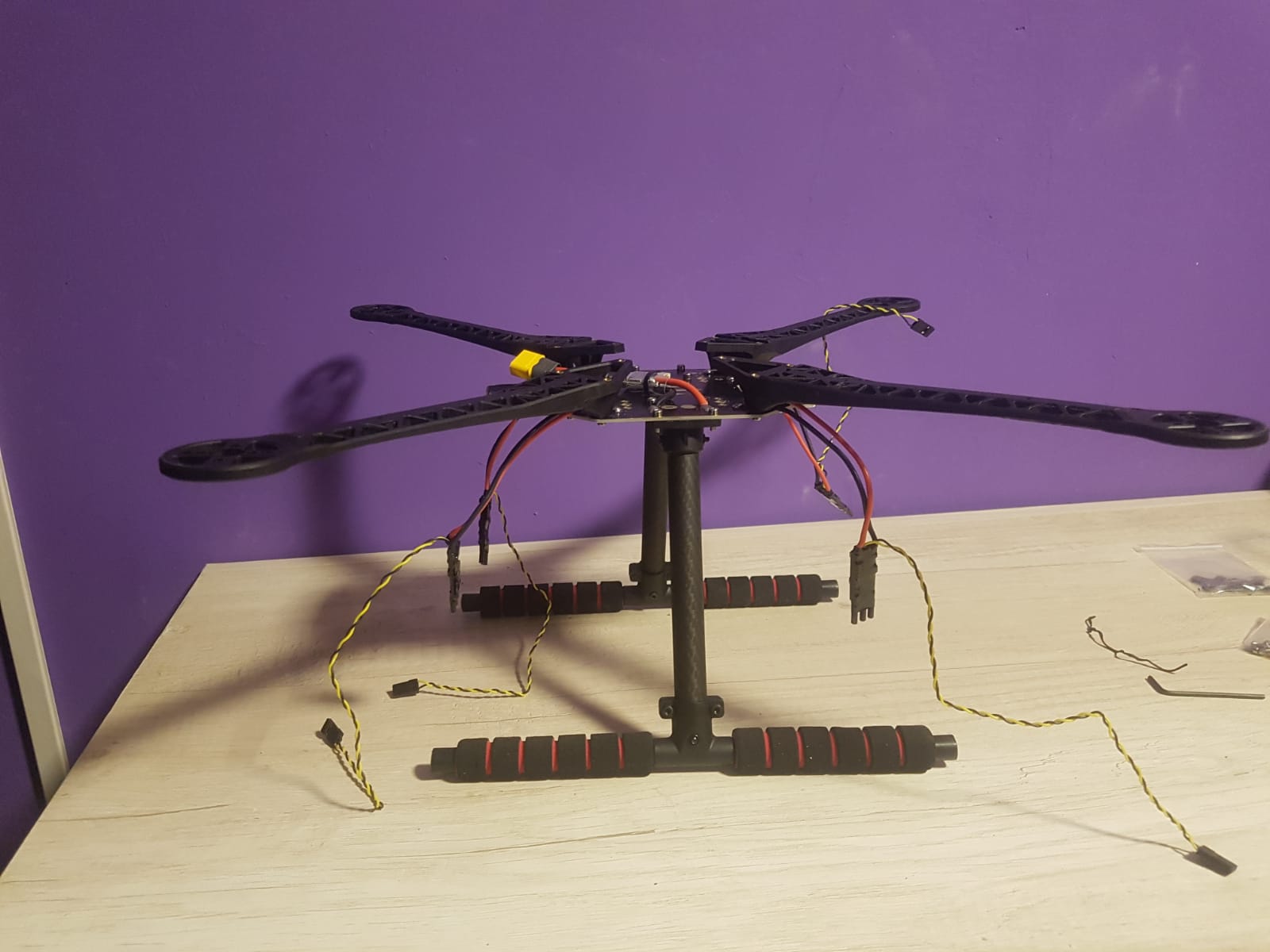 Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021 (parte 1)
Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021 (parte 1)
 Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021 (parte 2)
Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021 (parte 2)
3) Verificación previa al primer vuelo
Luego del armado mecánico es imprescindible realizar una verificación tanto de actuadores, conexiones eléctricas y del computador de vuelo. Ahora detallamos los pasos seguidos para corregir los errores que encontramos en nuestra experiencia.
- Paso 1: Verificar que la señal de control de cada motor este correctamente conectada con el computador de vuelo, en posición y polaridad.
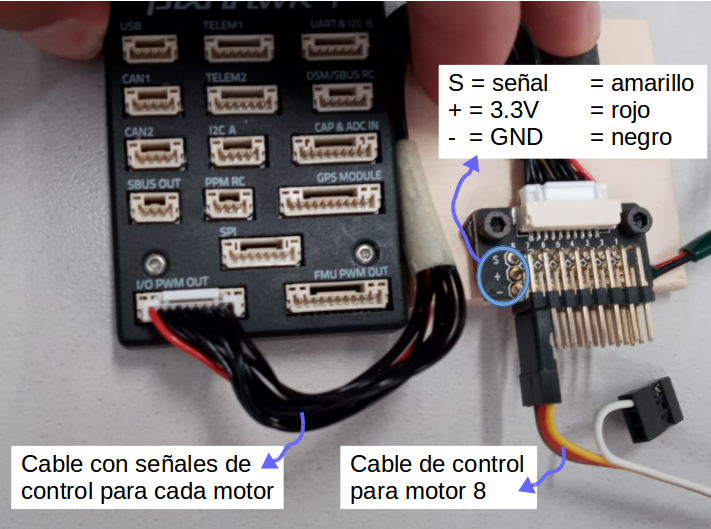 Orden y polaridad de conexión entre computador de vuelo y motores
Orden y polaridad de conexión entre computador de vuelo y motores
- Paso 2: Verificar que la ubicación de cada motor en el esqueleto corresponda con el tipo de “airframe” indicado, en nuestro caso “Quadrotor x” (SYS_AUTOSTART = 4015).
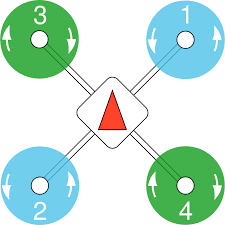 Ubicación y sentido de giro de los motores en el modelo Quadrotor x (SYS_AUTOSTART = 4015)
Ubicación y sentido de giro de los motores en el modelo Quadrotor x (SYS_AUTOSTART = 4015)
- Paso 3: Verificar que el sentido de giro de los motores coincidan con el tipo de “airframe” indicado, en nuestro caso “Quadrotor x” (SYS_AUTOSTART = 4015).
Tal como lo muestra la imagen del paso anterior, los motores deben girar en una determinada dirección. En caso de que el motor no gire en el sentido correcto la solución más sencilla es intercambiar dos de los tres cables que van desde el ESC al motor.
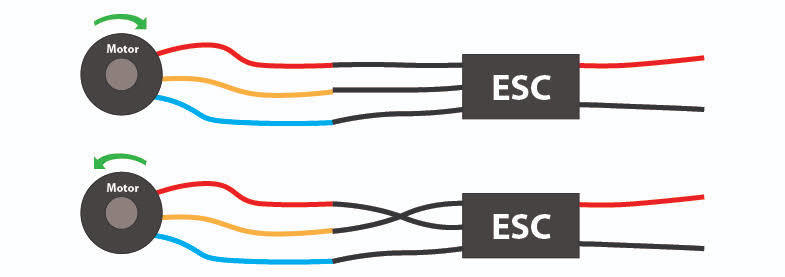 Intercambio de cables necesarios entre el ESC y el motor para cambiar el sentido de giro
Intercambio de cables necesarios entre el ESC y el motor para cambiar el sentido de giro
- Paso 4: Verificar que el sentido de giro de las hélices coincidan con el tipo de “airframe” indicado, en nuestro caso “Quadrotor x” (SYS_AUTOSTART = 4015).
Las hélices empleadas en estos kits y todas las comercializadas en el segmento multirotor vienen en dos tipos: horarias y anti-horarias. Cada hélice está diseñada para girar en un solo sentido. Si se gira en sentido contrario pasan dos cosas: 1) trabajará de manera ineficiente y produciendo una fuerza en sentido contrario (hacia abajo) y 2) si es de tipo “rosca” terminara desprendiéndose del eje del motor.
 Hélice de rotación ani-horario (tapa negra) y horaria (tapa plateada) y su vista lateral
Hélice de rotación ani-horario (tapa negra) y horaria (tapa plateada) y su vista lateral
Existen además diferentes tipos de mecanismos de sujeción entre la hélice y el motor. Las hélices más avanzadas tienden a tener adaptadores que se unen con pernos a la carcasa de giro del motor. De esta manera la hélice queda sujeta independiente del sentido de giro. Obviamente si la hélice gira en sentido incorrecto no habrá la generación de fuerza deseada.
 Adaptador para la fijación de la hélice al motor, frecuente en modelos más avanzados
Adaptador para la fijación de la hélice al motor, frecuente en modelos más avanzados
Un segundo tipo de mecanismo más simple consta de un rosca o hilo que traba la hélice de modo que ésta se mantiene apretada en la medida que gire en la dirección correcta. Lo esencial para este tipo de fijación es recordar que lo que importa es que el sentido de giro del motor sea correcto (ver paso anterior) y que al hacerlo la hélice se trabe. Esto se puede comprobar moviendo con los dedos el motor según lo indicado en el paso anterior y tocar la hélice con otra mano oponiéndose al movimiento. Si la hélice se suelta es de giro incorrecto, si se aprieta es de giro correcto.
Es muy importante realizar esta comprobación SIN BATERÍAS conectadas y sin haber energizado los motores. Solo se deben hacer girar los motores con las hélices montadas en el día, lugar y hora en la que se va a volar.
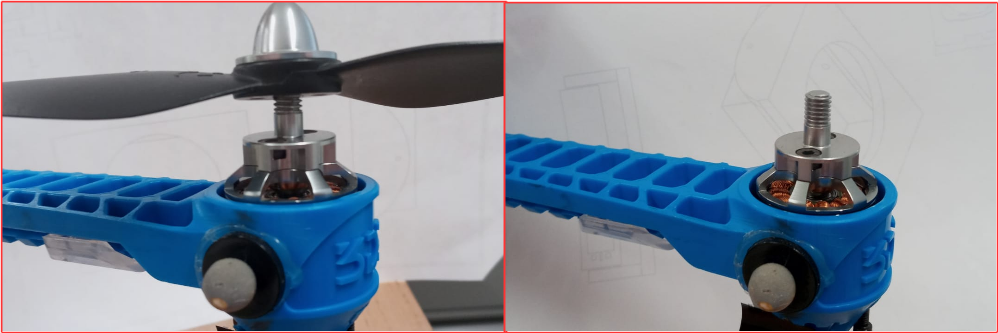 Rosca o hilo para la fijación de la hélice al motor, frecuente en modelos más básicos
Rosca o hilo para la fijación de la hélice al motor, frecuente en modelos más básicos
4) Primer vuelo


 Kit S500 de Holybro en su primer vuelo, Septiembre 2021
Kit S500 de Holybro en su primer vuelo, Septiembre 2021
El vuelo se realizó en Pirque, Región Metropolitana, Chile, el día 5 de Septiembre del 2021. Dos inconvenientes se identificaron al momento del primer despegue.
- Las batería usada al principio, al parecer, no tenían la suficiente capacidad de descargar. Es decir, no daban la corriente necesaria a los motores. Lo que generaba inestabilidad en el vehículo. Se debió reemplazar la batería por una del mismo voltaje (4S) pero mayor potencia.
- El computador de vuelo (Pixhawk) estaba adherido a la estructura por medio de una espuma aislante semi-rígida de aproximadamente 1cm de espesor. Sin embargo esta espuma no era la proveída por el fabricante, y generó problemas en la estimación de estados del vehículo (vibración excesiva). Se solucionó fijando con amarras plásticas el computador a la estructura, evitando vibraciones.
Ambos problemas fueron de fácil solución. El resultado final fue un vuelo estable y ágil que puede verse en el siguiente vídeos.
https://youtu.be/bWr7Q0OXhF4
| El siguiente es un artículo escrito con fines de divulgación y hecho con el mayor cuidado. Sin embargo no puedo garantizar que todo lo expuesto sea 100% correcto. Si encuentra algún error por favor háganmelo saber. |
| Historial de actualizaciones <ul><li>20-08-2021</li><li>21-08-2021</li><li>24-08-2021</li><li>05-09-2021</li></ul> |