Home | toopazo
Muchísimo y con muy justa razón se ha escrito sobre la revolución industrial que comenzó hacia 1700 en Inglaterra, y que se expandió luego al resto del mundo como un reguero de pólvora. Tan profundo y transformador ha sido todo este periodo que es difícil exagerar su impacto en la historia humana. Tan sólo la revolución del Neolitico (el paso de la vida nómada a sedentaria gracias a la agricultura y ganadería) se le puede comparar. Pero el impacto de la segunda es mucho más acentuado que la primera si consideramos su velocidad: un par de cientos de años en vez de un par de miles. Y para dar de muestra un botón, consideremos la vida de mi bis-abuela Maria Otilia Alfaro. Ella nació hacia fines de 1800 en Vicuña, un pueblo enclavado en medio de un valle agrícola rodeado de cerros semi-desérticos en el norte de Chile. Durante su infancia vio llegar a La Serena (capital de su provincia) la luz eléctrica que reemplazaba a los faroles de gas que servían de alumbrado público; escuchó hasta en los lugares más alejados del valle, la transmisión instantánea de las ondas de radio portadores de noticias de la capital; tomó pequeñas pastillas blancas que aliviaban su dolor de cabeza, las cuales habían sido fabricadas en masa por la naciente industria farmacéutica internacional; vio a través de una pantalla de televisión y sin necesidad de ir al estado, como se jugaba el mundial de fútbol de 1962; recibió en su casa a una caja metálica de generosas proporciones y ruidoso proceder que lavaba su ropa sin esfuerzo; fue testigo de la conquista del aire por parte de los aviones de la Compañía de Aviación Sudamericana entre Santiago y Valparaíso; y hasta vivió lo suficiente como para escuchar el código Morse que transmitió el Sputnik en 1957 y presenciar la llegada del hombre a la Luna abordo del Apollo 11 en 1969. La vida completa de esa mujer fue una sucesión de maravillas tecnológicas sin precedentes. Sin ninguna dificultad entendería mi bis-abuela la idea de que el desarrollo tecnológico permite la acumulación de conocimiento y herramientas que hacen más fácil el desarrollo de nueva tecnología, y que este proceso es auto-sustentado y hasta auto-acelerado. Es decir, un ejemplo de manual de un proceso con retroalimentación positiva.
Dentro de la amplia gama de problemas que la visión computacional busca resolver, el problema de reconocimiento facial no requiere de mucha introducción. Es fácil entender su gran impacto en aplicaciones de negocios, seguridad, legales, etc. Probablemente todos los que lean este articulo se habrán encontrado con alguna aplicación móvil que la requiera. Y hasta puede que se hayan preguntado por que su aplicación no es aún más masiva.
En este articulo me gustaría presentar mi trabajo en una variante particular del problema de reconocimiento facial: el reconocimiento de rostros a partir de videos. Explicado en sencillo, el desafío es lograr reconocer a la mayor cantidad de personas que aparecen en un video a medida que avanza. Es decir, si al segundo 23 apareció Juan Perez y al segundo 43 Maria Sandoval, queremos que el sistema reconozca a cada uno de ellos durante todo el tiempo que permanezcan en escena. Al final de la escena queremos tener una secuencia de recortes del rostro de Juan y otra secuencia de recortes del rostro de María. Si más adelante en el video, Juan o María vuelven a aparecer, queremos re-conocerlos y saber que son ellos. Aunque tengan otra ropa o estén en otro lugar físico.

¿Fue penal?.
Dentro de la amplia gama de problemas que la visión computacional busca resolver, esta el reconocimiento de acciones dentro de un video (secuencia de imágenes). Reconocer cuando alguien se cae, cuando alguien esta saludando con su mano, cuando dos personas están discutiendo, cuando alguien toca el piano o canta. El nombre en inglés de este problema de visión computacional es Human Action Recognition (HAR), que podríamos traducir como reconocimiento de acciones humanas. Aunque a mi gusto una mejor traducción sería reconocimiento kinestécico.
La importancia de incluir la variable temporal dentro del problema es evidente para todo conocedor del futbol: un penal no se puede decidir en base a una foto, debemos considerar la secuencia. Entender si hubo carga previa, considerar la intención y trayectoria del balón, juzgar si había riesgo de gol, etc. El contacto solo no permite decidir falta. Eso mismo sucede en muchos otros campos en que el problema no se puede resolver analizando imagen a imagen de forma aislada.

«No importa si el gato es negro o blanco, mientras pueda cazar ratones es un buen gato». Esa es la frase atribuída en 1978 a Deng Xiaoping y que dió inicio a la transformación de China hacia una economía de libre mercado abierta al mundo. Y con esto me refiero exactamente a eso, económica, no política ni social ni cultural. Sin bien una empuja y encadena a las otras, dicha transferencia no es obvia, ni directa, ni inevitable.
En el contexto de entender como será el siglo XXI en cuanto a ideología política es qe la frase de Deng Xiaoping puede ser analizada en forma de pregunta-contraste: ¿existe una alternativa, o siquiera variaciones relevantes, al sistema liberal en lo filosófica, valórico, económico y político (entendido como sistema de gobierno democrático “estándar”)?.
Hoy no fui a mi clase de ruso. Creo que es la tercera vez que pierdo una clase en todo el año. Esta semana no había tenido oportunidad de estudiar ni de hacer las tareas. Generalmente logro avanzar un poco los días Jueves y otro poco los Viernes. Pero este Jueves tuve que ir a terreno a Cruz Verde y luego a Falabella, por lo que ese dia llegué directo a dormir.

WordPress es un gestor de paginas web escrito en PHP e integrado a bases de datos locales para almacenar el contenido en si. Su código fuente es open-source y su uso es gratuito [1]. Contiene cientos de miles de ejemplos y extensiones de todo tipo para ser usado en miles de casos diferentes. Existe un ecosistema completo girando al rededor de su uso, desde los servidores que lo alojan (Hostinger, Bluehost, Ionos y miles de miles más) hasta creadores de plugins que lo complementan. Y para rematar la cosa, se estima que cerca del 40% de todos los sitios web disponibles en internet operan usando WordPress [2]. Por todo lo anterior vale la pena invertir la pregunta y cuestionarse: ¿porque no usar WordPress?.

El presente escrito es un reporte acerca de mi experiencia programando un ESC para obtener datos en linea. Un ESC es un controlador para motores sin escobilla que aumenta o disminuye la potencia inyectada a éste para así regular su velocidad de giro. Obtener datos instantáneos como voltaje, corriente y velocidad del motor son de vital importancia para estimar el consumo de cada rotor y pueden ser usados incluso como parte del controlador de vuelo. El software descrito en este reporte se encuentra disponible en el repositorio https://github.com/toopazo/live_esc
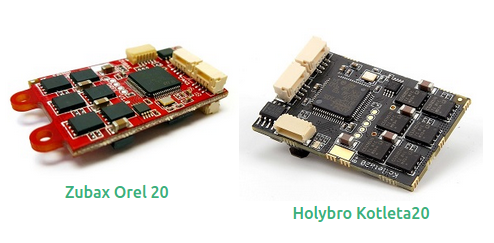

 Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
El presente escrito es un reporte acerca de los diferentes protocolos de control usados entre un ESC y un computador de vuelo. Todo esto en el contexto de vehículos autónomos no tripulados. Todos estos protocolos cumplen la misma función, indican cuan rapido o lento deben girar los motores. Pero una serie de caracteristicas tecnicas hacen que unos protocolos sean mejores que otros para ciertos vehículos.
Diferentes modelos de ESC usados en multirotores: Orel y Kotleta (UAVCAN), Phoenix Edge y KDE-UAS
El presente escrito es la versión practica de Alternativas Dronecode, un articulo anterior acerca de las alternativas open-source disponibles para volar un vehículo aéreo no tripulado. En particular explicaremos los componentes principales de todo multirotor, y nuestra experiencia al armar un kit S500 v2 de la empresa Holybro. Más que el armado en si mismo trataremos de describir la estructura general de todo vehículo así como los pasos que seguimos para verificar su correcto armado y vuelo.


 Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021
Kit S500 de Holybro, armado por Juan Cespedes, Agosto 2021



Las compañías de Drones dominantes como DJI, Parrot, SenseFly, Freefly, etc, ofrecen al mercado soluciones cerradas de hardware y software. Sus vehículos son de muy buena calidad y su fama es merecida. Pero si nuestra intención es aprender, experimentar, modificar o innovar con esta tecnología, entonces existen alternativas mejores que nos permiten hacer todo esto y más.
AWS - Cloud Practitioner Essentials
Este es una captura del correo de aprobación del curso AWS Cloud Practitioner Essentials que AWS ofrece a través de su plataforma https://skillbuilder.aws/#prepare-for-exam. Estos cursos son preparatorios para el examen de AWS Certified Cloud Practitioner, el cual no tome por costar 100 USD.